Viktor Robotic Third Arm
we built an arm yippee
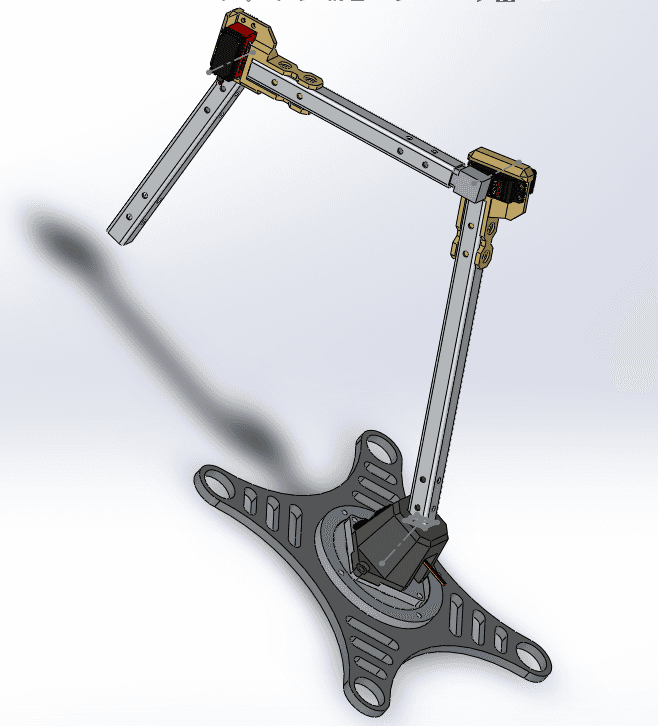
SolidWorks CAD
SolidWorks CAD
Microcontrollers
Microcontrollers
Python
Python
3D Printing
3D Printing
Machining
Machining
Duration
3 Weeks

OVERVIEW
you watched arcane? we built the arm. we formed a team at socratica one day and decided to build the arm. the arm that viktor had before he went ourple. not a laser pointer but it's fully controlled by a glove that reads how much your fingers are bent and angles the servos accordingly.
OVERVIEW
you watched arcane? we built the arm. we formed a team at socratica one day and decided to build the arm. the arm that viktor had before he went ourple. not a laser pointer but it's fully controlled by a glove that reads how much your fingers are bent and angles the servos accordingly.
OVERVIEW
you watched arcane? we built the arm. we formed a team at socratica one day and decided to build the arm. the arm that viktor had before he went ourple. not a laser pointer but it's fully controlled by a glove that reads how much your fingers are bent and angles the servos accordingly.
THE CHALLENGE
TIME FRAME was the biggest one, we had a very strict deadline of toronto comicon and did not have much time to build thanks to classes etc. We had to make several design concessions (such as being unable to solve the problem of the back lateral movement servo not being strong enough despite us even trying overvolting it) to get a minimum viable product done and dusted but we persevered and it was very well received
THE CHALLENGE
TIME FRAME was the biggest one, we had a very strict deadline of toronto comicon and did not have much time to build thanks to classes etc. We had to make several design concessions (such as being unable to solve the problem of the back lateral movement servo not being strong enough despite us even trying overvolting it) to get a minimum viable product done and dusted but we persevered and it was very well received
THE CHALLENGE
TIME FRAME was the biggest one, we had a very strict deadline of toronto comicon and did not have much time to build thanks to classes etc. We had to make several design concessions (such as being unable to solve the problem of the back lateral movement servo not being strong enough despite us even trying overvolting it) to get a minimum viable product done and dusted but we persevered and it was very well received
THE SOLUTION
crunch time baby, spent 3 consecutive nights working on the project until the wee hours of the morning in jackie's apartment. i can dedicate myself to things i swear
THE SOLUTION
crunch time baby, spent 3 consecutive nights working on the project until the wee hours of the morning in jackie's apartment. i can dedicate myself to things i swear
THE SOLUTION
crunch time baby, spent 3 consecutive nights working on the project until the wee hours of the morning in jackie's apartment. i can dedicate myself to things i swear
THE RESULT
arm demoed at both Toronto Comicon 2025 and Socratica Symposium 2025, functioning the whole way through with minor repairs and after I did some reprogramming on the fly. Quite durable, withstood over 5 hours of constant use both days.
THE RESULT
arm demoed at both Toronto Comicon 2025 and Socratica Symposium 2025, functioning the whole way through with minor repairs and after I did some reprogramming on the fly. Quite durable, withstood over 5 hours of constant use both days.
THE RESULT
arm demoed at both Toronto Comicon 2025 and Socratica Symposium 2025, functioning the whole way through with minor repairs and after I did some reprogramming on the fly. Quite durable, withstood over 5 hours of constant use both days.


Conclusion
learned how to integrate my designs with other functionality built by others (designing for compatibility+installation friendly+etc)